This soft robotic fish is reef friendly and won’t scare away the real thing

Fish, like most animals, have a pretty good idea of which other animals they’re cool with, and which animals they’re not. Very few animals are cool with humans, and fish are no exception—maybe they’re afraid, maybe they’re curious, and maybe they’ll pretend to ignore you until you get too close, but in any of these cases, your presence is affecting their behavior.
We’ve seen many clever examples of animal behavior researchers using robots to study their subjects up close with minimal disruption, and in a paper published in Science Robotics today, roboticists at MIT’s Computer Science and Artificial Intelligence Laboratory describe a new kind of soft robotic spy fish that can more or less blend right in with everything else living on a coral reef.
SoFi, MIT’s soft robotic fish, is designed to provide close-range, minimally disruptive observations of all the fascinating and adorable animals that live underwater. The MIT roboticists (Robert K. Katzschmann, Joseph DelPreto, Robert MacCurdy, and Professor Daniela Rus) were careful to make SoFi as similar in size and behavior to a real fish as was possible, but they also had to make it completely self-contained and actually useful—SoFi isn’t just a proof-of-concept for the design of a biomimetic robotic fish, it’s a real research tool, with a friendly control system, and practical battery life.
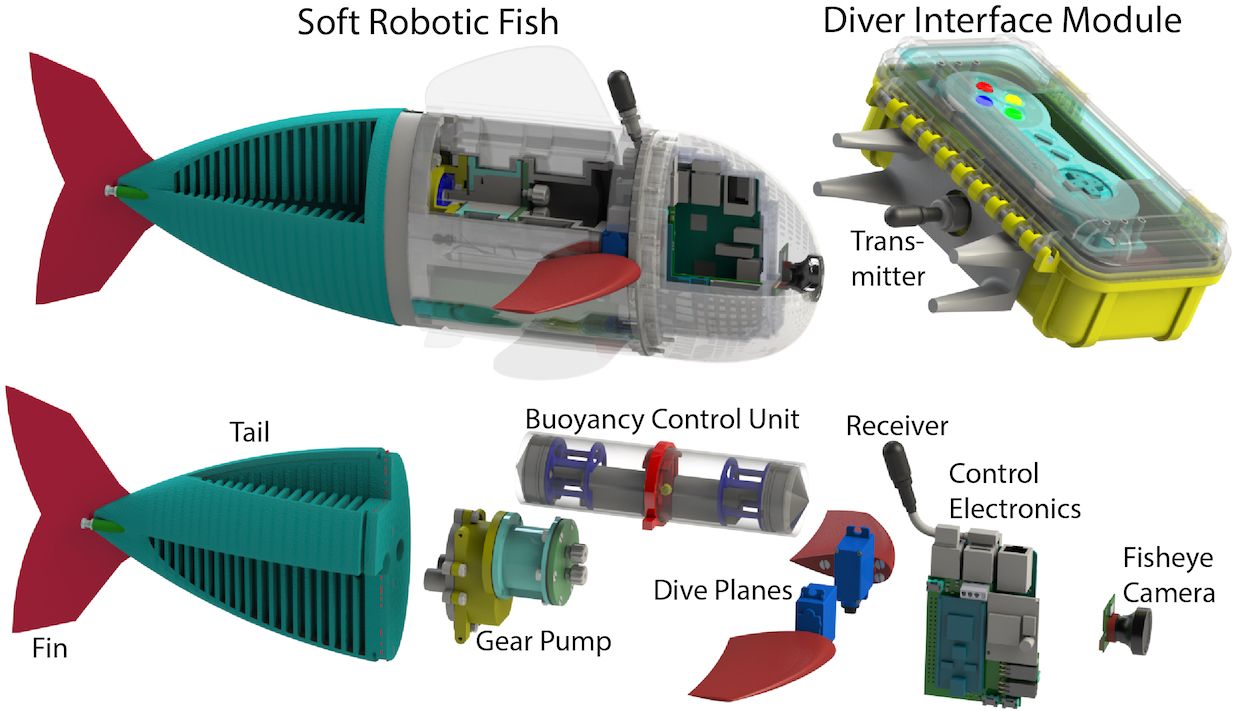
SoFi is steered by a diver using a waterproofed game controller that communicates with the robot ultrasonically, and the the robot fish is able to translate high level directional commands into 3D trajectories that it can execute. Battery life is a solid 40 minutes, which is perfectly respectable, since most human divers don’t spend more than about an hour underwater anyway.

The robot moves more or less in the same way that real fish do. Primary propulsion comes from the tail, which is actuated at between 0.9 Hz and 1.4 Hz by pumping oil into one side of the tail and then the other to make it flex back and forth, giving it a top speed of 21.7 centimeters per second. By changing the proportion of oil that gets pumped into each side, the tail can be made to flex more either to the left or the right, causing SoFi to turn. Dive planes and a piston displacement buoyancy control system keep the fish stable, and it can dive to over 18 meters.
Part of me is convinced that roboticists take on projects like these at least partially because it’s a great way to justify a trip somewhere exotic. In this case, SoFi was taken to Fiji, a location that “offers numerous coral reef environments with varying tidal conditions, allowing SoFi to be evaluated in real-world conditions where the interactions of marine life and the biocenosis of coral reefs can be studied.” Uhhuh. That sounds like a little bit of rationalizing from these Boston-based researchers, but I can relate—I’ve been to Fiji a bunch of times, and the diving there is world class.

Anyway, SoFi was taken out for six dives over three days, spending a total of 240 minutes wiggling away underwater. A diver tailing SoFi from about 10 meters back tried to steer it “as possible to interesting environmental features and marine life.” The researchers observed qualitatively that SoFi didn’t scare nearby fish, although it’ll take more experimentation to figure out exactly what kind of impact a robotic fish like this has on the real thing. Eventually, the researchers hope to have entire schools of SoFis collaborating to study underwater ecosystems over much wider areas, and they’re also looking at ways of introducing visual fish-following to enable some underwater autonomy.
“Exploration of underwater life with an acoustically controlled soft robotic fish,” by Robert K. Katzschmann, Joseph DelPreto, Robert MacCurdy, and Daniela Rus from MIT CSAIL, appears in the current issue of Science Robotics.
Source: IEEE Spectrum Robotics