Fundamentally, a samara design acts as a decelerator for an aerial payload. You can think of it like a parachute: It makes sure that whatever you toss out of an airplane gets to the ground intact rather than just smashing itself to bits on impact. Steering is possible, but you don’t get a lot of stability or precision control. The RA-L paper describes one solution to this, which is to collaboratively use five drones at once in a configuration that looks a bit like a helicopter rotor.
And once the multi-drone is right where you want it, the five individual samara drones can split off all at once, heading out on their own missions. It’s quite a sight:
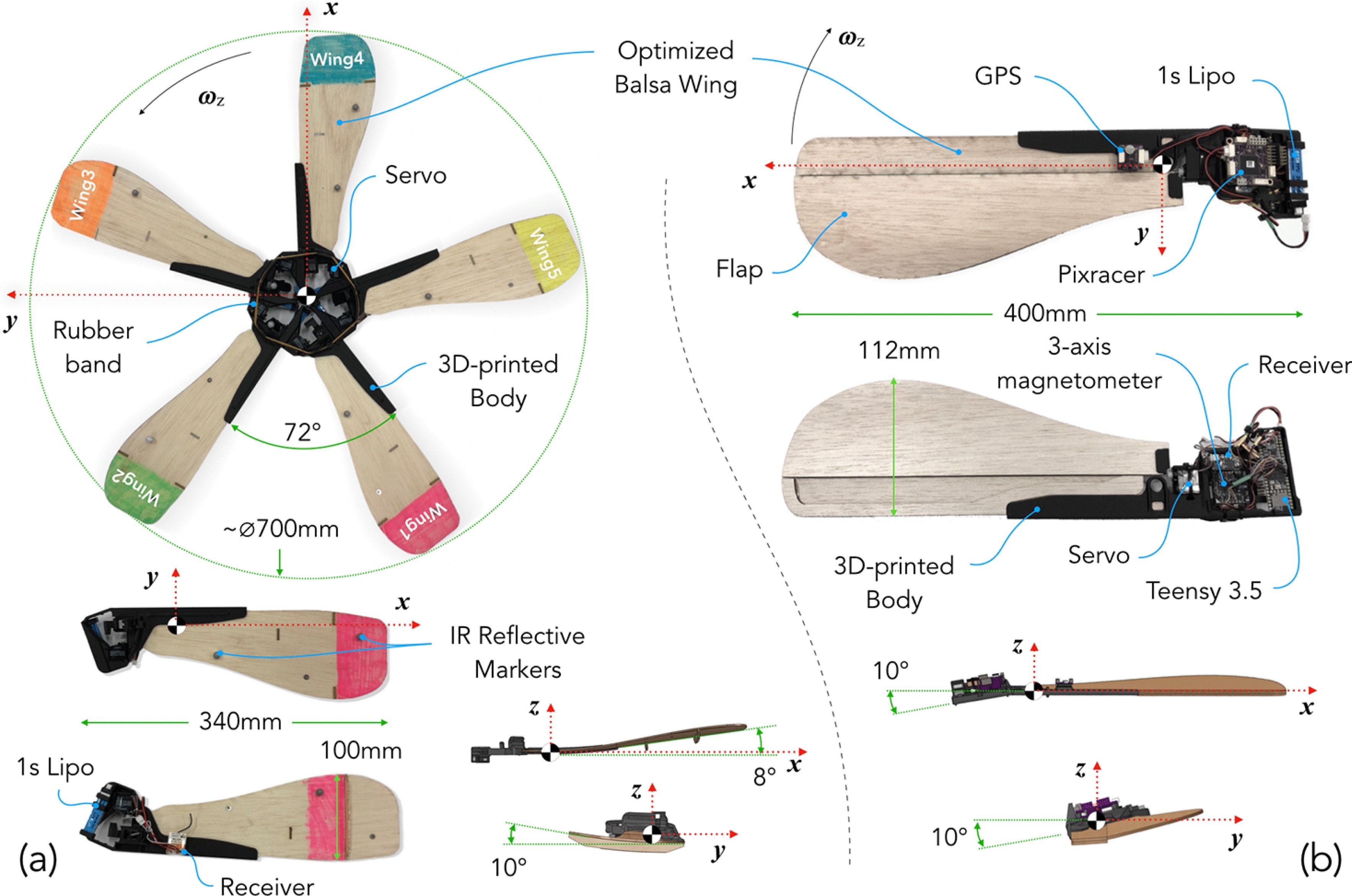
The concept features a collaborative autorotation in the initial stage of drop whereby several wings are attached to each other to form a rotor hub. The combined form achieves higher rotational energy and a collaborative control strategy is possible. Once closer to the ground, they can exit the collaborative form and continue to descend to unique destinations. A section of each wing forms a flap and a small actuator changes its pitch cyclically. Since all wing-flaps can actuate simultaneously in collaborative mode, better maneuverability is possible, hence higher resistance against environmental conditions. The vertical and horizontal speeds can be controlled to a certain extent, allowing it to navigate towards a target location and land softly.
The samara autorotating wing drones themselves could conceivably carry small payloads like sensors or emergency medical supplies, with these small-scale versions in the video able to handle an extra 30 grams of payload. While they might not have as much capacity as a traditional fixed-wing glider, they have the advantage of being able to descent vertically, and can perform better than a parachute due to their ability to steer. The researchers plan on improving the design of their little drones, with the goal of increasing the rotation speed and improving the control performance of both the individual drones and the multi-wing collaborative version.
“Dynamics and Control of a Collaborative and Separating Descent of Samara Autorotating Wings,” by Shane Kyi Hla Win, Luke Soe Thura Win, Danial Sufiyan, Gim Song Soh, and Shaohui Foong from Singapore University of Technology and Design, appears in the current issue of IEEE Robotics and Automation Letters.
[ SUTD ]