Let’s talk about trap-jaw ants for just a second, because they’re insane. You can read this 2006 paper about them if you’re particularly interested in insane ants (and who isn’t!), but if you just want to hear the insane bit, it’s that trap-jaw ants can fire themselves into the air by biting the ground (!). In just 0.06 millisecond, their half-millimeter long mandibles can close at a top speed of 64 meters per second, which works out to an acceleration of about 100,000 g’s. Biting the ground causes the ant’s head to snap back with a force of 300 times the body weight of the ant itself, which launches the ant upwards. The ants can fly 8 centimeters vertically, and up to 15 cm horizontally—this is a lot, for an ant that’s just a few millimeters long.
EPFL’s robots, called Tribots, look nothing at all like trap-jaw ants, which personally I am fine with. They’re about 5 cm tall, weighing 10 grams each, and can be built on a flat sheet, and then folded into a tripod shape, origami-style. Or maybe it’s kirigami, because there’s some cutting involved. The Tribots are fully autonomous, meaning they have onboard power and control, including proximity sensors that allow them to detect objects and avoid them.

Avoiding objects is where the trap-jaw ants come in. Using two different shape-memory actuators (a spring and a latch, similar to how the ant’s jaw works), the Tribots can move around using a bunch of different techniques that can adapt to the terrain that they’re on, including:
- Vertical jumping for height
- Horizontal jumping for distance
- Somersault jumping to clear obstacles
- Walking on textured terrain with short hops (called «flic-flac» walking)
- Crawling on flat surfaces
Here’s the robot in action:
Tribot’s maximum vertical jump is 14 cm (2.5 times its height), and horizontally it can jump about 23 cm (almost 4 times its length). Tribot is actually quite efficient in these movements, with a cost of transport much lower than similarly-sized robots, on par with insects themselves.
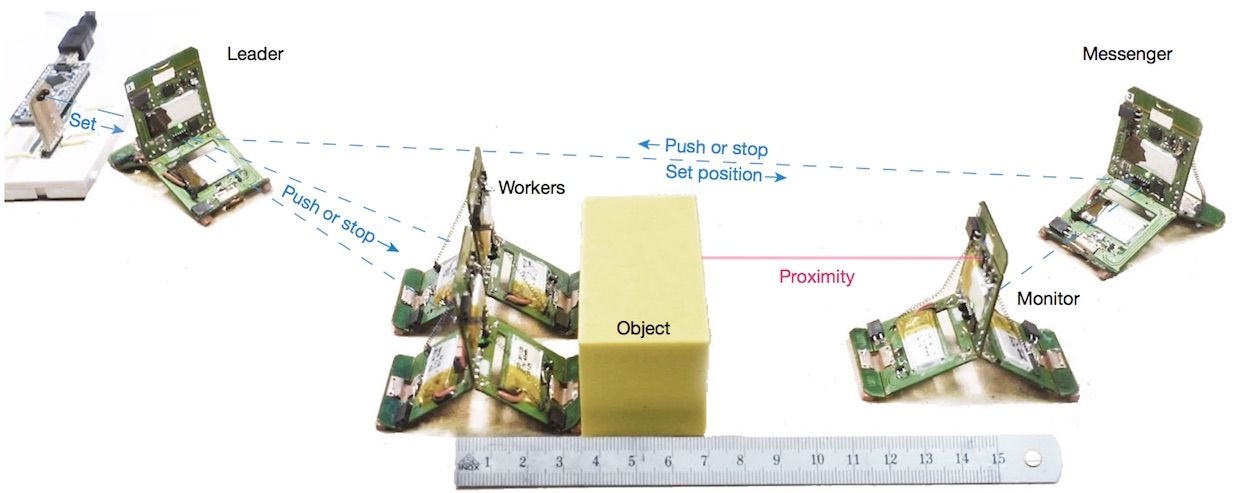
Working together, small groups of Tribots can complete tasks that a single robot couldn’t do alone. One example is pushing a heavy object a set distance. It turns out that you need five Tribots for this task—a leader robot, two worker robots, a monitor robot to measure the distance that the object has been pushed, and then a messenger robot to relay communications around the obstacle.
The researchers acknowledge that the current version of the hardware is limited in pretty much every way (mobility, sensing, and computation), but it does a reasonable job of demonstrating what’s possible with the concept. The plan going forward is to automate fabrication in order to «enable on-demand, ’push-button-manufactured’» robots.