Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
Robotics Summit & Expo: 10–11 May 2023, BOSTON
ICRA 2023: 29 May–2 June 2023, LONDON
Energy Drone & Robotics Summit: 10–12 June 2023, HOUSTON
RoboCup 2023: 4–10 July 2023, BORDEAUX, FRANCE
RSS 2023: 10–14 July 2023, DAEGU, SOUTH KOREA
IEEE RO-MAN 2023: 28–31 August 2023, BUSAN, SOUTH KOREA
CLAWAR 2023: 2–4 October 2023, FLORIANOPOLIS, BRAZIL
Humanoids 2023: 12–14 December 2023, AUSTIN, TEX.
Enjoy today’s videos!
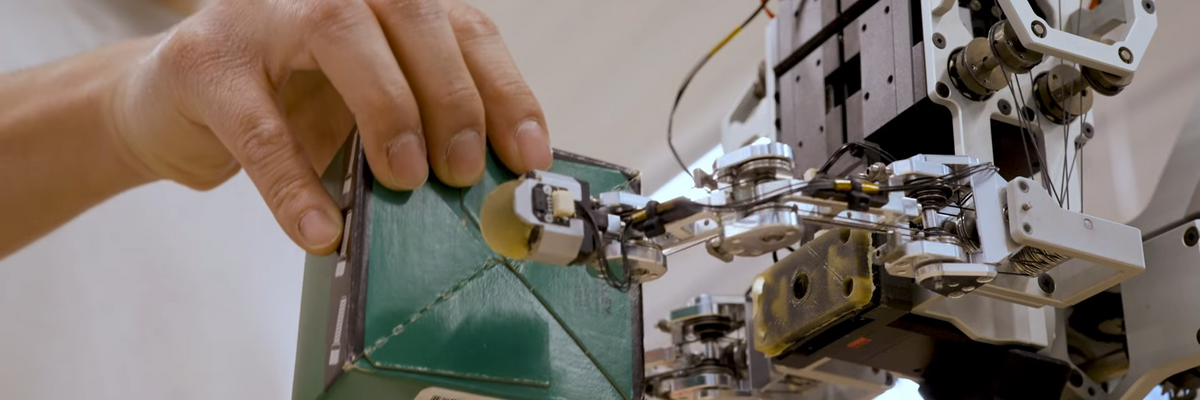
Looking to give robots a more nimble, human-like touch MIT engineers have now developed a gripper that grasps by reflex. Rather than start from scratch after a failed attempt, the team’s robot adapts in the moment to reflexively roll, palm, or pinch an object to get a better hold.
[ MIT ]
Roboticists at the Max Planck Institute for Intelligent Systems in Stuttgart have developed a jellyfish-inspired underwater robot with which they hope one day to collect waste from the bottom of the ocean. The almost noise-free prototype can trap objects underneath its body without physical contact, thereby enabling safe interactions in delicate environments such as coral reefs. Jellyfish-Bot could become an important tool for environmental remediation.
Excited to share our latest collaborative work on humanoid robot behaviors with Draco 3. We look forward to a day that these robots can help us at home and at work to perform dull and time consuming tasks!
[ UT HCRL ]
This research focuses on the design of a novel hybrid gripper that enables versatile grasping and throwing manipulation with a single actuator. The gripper comprises a unique latching mechanism that drives two passive rigid fingers by elongating/releasing the coupled elastic strip. This arrangement provides the dual function of adapting to objects with different geometries, varying surface contact force characteristics, and storing energy in the form of elastic potential. The proposed latching mechanism can swiftly shift from a quick release to a gradual release of the stored elastic potential, enabling greater object acceleration during throwing and no acceleration while placing. By doing so, the object can be placed at the desired location even farther than the manipulator’s reachable workspace.
[ Paper ]
Thanks, Nagamanikandan!
Animals (or at least, many animals) are squishy for a reason–it helps to manage safe environmental contact. Let’s make all robots squishy!
[ Paper ]
Thanks, Pham!
This short video shows an actuator from Ed Habtour at the University of Washington, modeled after the vertebrae of sea birds and snakes.
[ UW ]
Thanks, Sarah!
This video presents results on autonomous exploration and visual inspection of a ballast tank inside an FPSO vessel. Specifically, RMF–a collision tolerant aerial robot implementing multi-modal SLAM and path planning functionality–is deployed inside the ballasts of the vessel and performs the autonomous inspection of 3 tank compartments without any prior knowledge of the environment other than a rough estimate of the geometric midpoint of each compartment. Such information is readily available and does not require access to hard-to-access CAD models of ships. The mission takes place in less than 4 minutes and ensures both the geometric mapping of those compartments and their visual inspection with certain resolution guarantees.
[ ARL ]
A team from Los Alamos National Laboratory recently went to the Haughton Impact Crater on Devon Island, Canada. It is the largest uninhabited island in the world. Nina Lanza and her team tested autonomous drones in the frigid environment that is similar to Mars.
[ LANL ]
OK, once urban delivery drones can do this, maybe I’ll pay more attention to them.
[ HKUST ]
Founded in 2014, Verity delivers fully autonomous indoor drone systems that are trusted in environments where failure is not an option. Based in Zurich, Switzerland, with global operations, Verity’s system is used to complete thousands of fully autonomous inventory checks every day in warehouses everywhere.
[ Verity ]
In this video you will learn about the ACFR marine group and some of the research projects they are currently working on.
[ ACFR ]
I am including this video because growing tea is beautiful.
[ SUIND ]
In this video we showcase a Husky-based robot equipped with a Franka Research 3 Robotics Arm. The Franka Research 3 by Franka Emika is the reference world-class, force sensitive robot system that empowers researchers with easy-to-use robot features as well as with low-level access to robot’s control and learning capabilities. The robot is also outfitted with Clearpath’s IndoorNav Autonomy Software, which enables robust point-to-point autonomous navigation of mobile robots.
[ Clearpath ]
This Tartan Planning Series talk on is from Sebastian Scherer, on “Informative Path Planning, Exploration, and Intent Prediction.”
[ Air Lab ]
This Stanford HAI Seminar is from Oussama Khatib, on “From Romeo and Juliet to OceanOnek; Deep-Sea Robotic Exploration.”
[ Stanford HAI ]
Source: IEEE Spectrum Robotics